Un nuevo método de imagen hace visibles diminutos robots en el cuerpo
Importante avance en la fusión eficaz de la microrobótica y la imagen
Anuncios



Los microrobots pueden revolucionar la medicina. Investigadores del Centro Max Planck ETH para Sistemas de Aprendizaje han desarrollado una técnica de imagen que, por primera vez, reconoce microrrobots del tamaño de una célula de forma individual y con alta resolución en un organismo vivo.
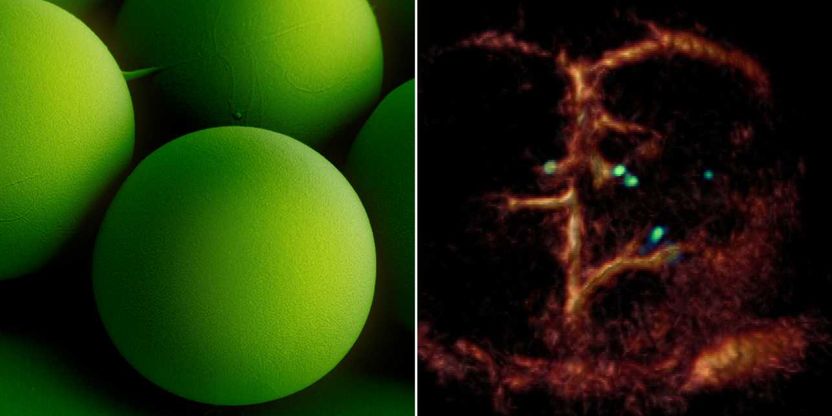
Un gran avance: Los diminutos microrrobots circulantes, que son tan pequeños como los glóbulos rojos (imagen de la izquierda), fueron visualizados uno a uno en los vasos sanguíneos de los ratones con imágenes optoacústicas (imagen de la derecha).
ETH Zürich / Max-Planck-Institut für Intelligente Systeme
¿Cómo se puede eliminar un coágulo de sangre del cerebro sin necesidad de una gran intervención quirúrgica? ¿Cómo puede administrarse un medicamento con precisión en un órgano enfermo de difícil acceso? Éstos son sólo dos ejemplos de las innumerables innovaciones previstas por los investigadores del campo de la microrobótica médica. Los robots diminutos prometen cambiar fundamentalmente los tratamientos médicos del futuro: un día, podrían desplazarse por la vasculatura del paciente para eliminar tumores malignos, combatir infecciones o proporcionar información diagnóstica precisa de forma totalmente no invasiva. En principio, según los investigadores, el sistema circulatorio podría ser la vía ideal para los microrobots, ya que llega a todos los órganos y tejidos del cuerpo.
Para que estos microrobots puedan realizar las intervenciones médicas previstas con seguridad y fiabilidad, no deben ser más grandes que una célula biológica. En los seres humanos, una célula tiene un diámetro medio de 25 micrómetros -un micrómetro es la millonésima parte de un metro-. Los vasos sanguíneos más pequeños del ser humano, los capilares, son aún más finos: su diámetro medio es de sólo 8 micrómetros. Los microrobots deben ser igualmente pequeños para poder atravesar los vasos sanguíneos más pequeños sin obstáculos. Sin embargo, este tamaño tan pequeño también los hace invisibles a simple vista, y la ciencia tampoco ha encontrado aún una solución técnica para detectar y seguir a los microrrobots individualmente mientras circulan por el cuerpo.
Seguimiento de los microrobots en circulación por primera vez
"Antes de que este escenario futuro se haga realidad y los microrobots se utilicen realmente en los seres humanos, es absolutamente necesaria la visualización y el seguimiento precisos de estas diminutas máquinas", afirma Paul Wrede, becario de doctorado del Centro de Sistemas de Aprendizaje (CLS) de la ETH Max Planck. "Sin imágenes, la microrobótica es esencialmente ciega", añade Daniel Razansky, profesor de imágenes biomédicas en la ETH de Zúrich y la Universidad de Zúrich y miembro del CLS. "La obtención de imágenes de alta resolución en tiempo real es, por tanto, esencial para detectar y controlar microrobots del tamaño de una célula en un organismo vivo". Además, la obtención de imágenes es también un requisito previo para supervisar las intervenciones terapéuticas realizadas por los robots y verificar que han llevado a cabo su tarea según lo previsto. "La falta de capacidad para proporcionar información en tiempo real sobre los microrobots era, por tanto, un obstáculo importante en el camino hacia la aplicación clínica".
Junto con Metin Sitti, un experto en microrobótica líder en el mundo que también es miembro del CLS en calidad de director del Instituto Max Planck de Sistemas Inteligentes (MPI-IS) y profesor de Inteligencia Física del ETH, y otros investigadores, el equipo ha logrado ahora un importante avance en la fusión eficiente de la microrobótica y la imagen. En un estudio que acaba de publicarse en la revista científica Science Advances, han conseguido por primera vez detectar y seguir con claridad robots diminutos de hasta cinco micrómetros en tiempo real en los vasos cerebrales de los ratones mediante una técnica de imagen no invasiva.
Los investigadores utilizaron microrobots de tamaños comprendidos entre 5 y 20 micrómetros. Los robots más pequeños tienen el tamaño de los glóbulos rojos, que tienen entre 7 y 8 micrómetros de diámetro. Este tamaño hace posible que los microrobots inyectados por vía intravenosa se desplacen incluso a través de los microcapilares más finos del cerebro del ratón.
Los investigadores también desarrollaron una tecnología de tomografía optoacústica específica para detectar los minúsculos robots uno por uno, en alta resolución y en tiempo real. Este método único de obtención de imágenes permite detectar los diminutos robots en regiones profundas y de difícil acceso del cuerpo y el cerebro, lo que no habría sido posible con la microscopía óptica ni con ninguna otra técnica de obtención de imágenes. El método se denomina optoacústico porque la luz se emite primero y es absorbida por el tejido correspondiente. La absorción produce entonces diminutas ondas de ultrasonido que pueden detectarse y analizarse para obtener imágenes volumétricas de alta resolución.
Robots con cara de Jano y capa de oro
Para que los microrrobots fueran muy visibles en las imágenes, los investigadores necesitaban un material de contraste adecuado. Por ello, utilizaron para su estudio microrobots esféricos, basados en partículas de sílice, con un recubrimiento del tipo Janus. Este tipo de robot tiene un diseño muy robusto y está muy bien capacitado para realizar tareas médicas complejas. Recibe su nombre del dios romano Jano, que tenía dos caras. En los robots, las dos mitades de la esfera están recubiertas de forma diferente. En el estudio actual, los investigadores recubrieron una mitad del robot con níquel y la otra con oro.
"El oro es un agente de contraste muy bueno para las imágenes optoacústicas", explica Razansky, "sin la capa dorada, la señal generada por los microrobots es demasiado débil para ser detectada". Además del oro, los investigadores también probaron el uso de pequeñas burbujas llamadas nanoliposomas, que contenían un colorante verde fluorescente que también servía como agente de contraste. "Los liposomas también tienen la ventaja de que se pueden cargar con fármacos potentes, lo que es importante para futuros enfoques de la administración de fármacos dirigidos", dice Wrede, primer autor del estudio. Los posibles usos de los liposomas se investigarán en un estudio posterior.
Además, el oro también permite minimizar el efecto citotóxico del recubrimiento de níquel; al fin y al cabo, si en el futuro los microrrobots van a funcionar en animales vivos o en humanos, deben ser biocompatibles y no tóxicos, algo que forma parte de una investigación en curso. En el presente estudio, los investigadores utilizaron níquel como medio de accionamiento magnético y un simple imán permanente para tirar de los robots. En estudios posteriores, quieren probar las imágenes optoacústicas con manipulaciones más complejas utilizando campos magnéticos giratorios.
"Esto nos daría la posibilidad de controlar y mover con precisión los microrobots incluso en sangre que fluye con fuerza", dice Metin Sitti. "En el presente estudio nos centramos en la visualización de los microrobots. El proyecto tuvo un éxito tremendo gracias al excelente entorno de colaboración del CLS, que permitió combinar la experiencia de los dos grupos de investigación del MPI-IS de Stuttgart para la parte robótica y del ETH de Zúrich para la parte de imagen", concluye Sitti.
Nota: Este artículo ha sido traducido utilizando un sistema informático sin intervención humana. LUMITOS ofrece estas traducciones automáticas para presentar una gama más amplia de noticias de actualidad. Como este artículo ha sido traducido con traducción automática, es posible que contenga errores de vocabulario, sintaxis o gramática. El artículo original en Inglés se puede encontrar aquí.
Publicación original
Más noticias del departamento ciencias




































